Bien que les animaux naissent avec des réseaux de coordination musculaire situés dans leur moelle épinière, l’apprentissage de la coordination précise des muscles et des tendons des jambes prend un certain temps. Au début, les bébés animaux s’appuient fortement sur les réflexes médullaires câblés qui les aident à éviter de tomber lors de leurs premières tentatives de marche. Le contrôle musculaire plus avancé et plus précis qui caractérise les animaux adultes doit être pratiqué, jusqu’à ce que le système nerveux soit bien adapté aux muscles et aux tendons des pattes.
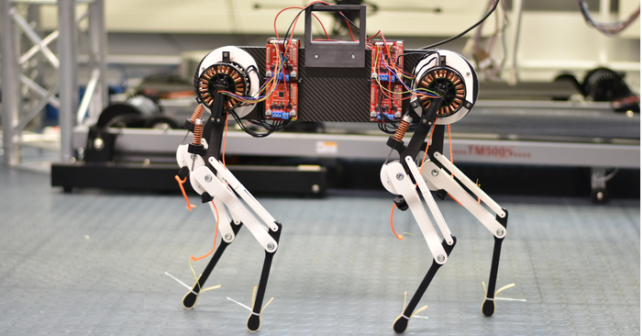
Afin de mieux comprendre comment les animaux apprennent à marcher, une équipe de recherche de l’Institut Max Planck pour les systèmes intelligents (MPI-IS) de Stuttgart a construit un robot à quatre pattes de la taille d’un chien qui a progressivement appris à marcher à l’aide d’un Algorithme d’optimisation bayésien qui comparait en permanence les informations envoyées et attendues des capteurs, exécutait des boucles réflexes et adaptait les modèles de contrôle moteur du robot.
« En tant qu’ingénieurs et roboticiens, nous avons cherché la réponse en construisant un robot doté de réflexes semblables à ceux d’un animal et qui apprend de ses erreurs », a déclaré l’auteur principal de l’étude, Felix Ruppert, ancien doctorant au MPI-IS. « Si un animal trébuche, est-ce une erreur ? Pas si cela arrive une fois. Mais s’il trébuche fréquemment, cela nous donne une idée de la façon dont le robot marche. »
L’algorithme d’apprentissage construit par le Dr Ruppert et son équipe simulait les paramètres de contrôle d’un générateur central de modèles (CPG), ainsi que les réflexes qui caractérisent les êtres vivants. Chez les animaux, ces CPG sont des réseaux de neurones dans la moelle épinière qui produisent des contractions musculaires périodiques sans intervention du cerveau et facilitent la génération de tâches rythmiques telles que la marche, la digestion ou le clignement des yeux.
Tant qu’un animal marche sur des surfaces planes, les CPG suffisent généralement à contrôler les signaux de mouvement provenant de la moelle épinière. Cependant, s’il trébuche, des réflexes se déclenchent et ajustent les schémas de mouvement pour empêcher l’animal de tomber. Alors que chez les animaux nouveau-nés, les CPG ne sont pas encore suffisamment bien ajustés et que les animaux trébuchent fréquemment, ils apprennent rapidement comment leurs CPG et leurs réflexes contrôlent les muscles et les tendons des pattes. En imitant ces mécanismes biologiques, le chien robot que les scientifiques ont construit a surpassé les animaux en termes de rapidité avec laquelle il a appris à marcher – en une heure environ.
« Notre robot est pratiquement né sans rien savoir de l’anatomie de ses jambes ni de leur fonctionnement », a expliqué le Dr Ruppert. « Le CPG ressemble à une intelligence de marche automatique intégrée que la nature fournit et que nous avons transférée au robot. L’ordinateur produit des signaux qui contrôlent les moteurs des jambes, et le robot marche et trébuche initialement.
« Les données reviennent des capteurs vers la moelle épinière virtuelle où les données des capteurs et celles du CPG sont comparées. Si les données du capteur ne correspondent pas aux données attendues, l’algorithme d’apprentissage modifie le comportement de marche jusqu’à ce que le robot marche bien, et sans trébucher. Changer la sortie du CPG tout en gardant les réflexes actifs et en surveillant les trébuchements du robot est un élément essentiel du processus d’apprentissage.
« Nous ne pouvons pas facilement étudier la moelle épinière d’un animal vivant. Mais nous pouvons en modéliser un dans le robot », a ajouté le co-auteur de l’étude Alexander Badri-Spröwitz, expert en biomécanique au MPI-IS.
« Nous savons que ces CPG existent chez de nombreux animaux. Nous savons que les réflexes sont ancrés ; mais comment combiner les deux pour que les animaux apprennent des mouvements avec des réflexes et des CPG ? Il s’agit d’une recherche fondamentale à l’intersection de la robotique et de la biologie. Le modèle robotique nous apporte des réponses à des questions auxquelles la biologie seule ne peut répondre », a-t-il conclu.
L’étude est publiée dans la revue Intelligence des machines naturelles.
Crédit image : Felix Ruppert, Dynamic Locomotion Group au MPI-IS
—
Par Andreï Ionescu, Espèces-menacées.fr Rédacteur












0 réponse à “Un chien robot apporte un nouvel éclairage sur la façon dont les animaux apprennent à marcher”